1 Εισαγωγή
Η υπέρυθρη ακτινοβολία (Infrared radiation – IR) είναι μη ορατή ηλεκτρομαγνητική ακτινοβολία, με μήκη κύματος μεγαλύτερα από αυτό του ερυθρού φωτός, η οποία τυπικά καλύπτει το φάσμα από τα 300 GHz (μήκος κύματος 1 mm ή 1000 μm) έως τα 430 THz (0,7 μm). Κάθε αντικείμενο με θερμοκρασία πάνω από το απόλυτο μηδέν εκπέμπει ηλεκτρομαγνητική ακτινοβολία, κυρίως στο υπέρυθρο φάσμα. Αντικείμενα σε υψηλότερες θερμοκρασίες εκπέμπουν επίσης και ορατό φως, όπως στην περίπτωση του λαμπτήρα πυρακτώσεως. Η φασματική πυκνότητα της ηλεκτρομαγνητικής ακτινοβολίας που εκπέμπεται από ένα μέλαν σώμα σε θερμική ισορροπία δίδεται από τον νόμο του Planck [1].
Καθώς η υπέρυθρη ακτινοβολία διαδίδεται μέσω της ατμόσφαιρας, απορροφάται από υδρατμούς, διοξείδιο του άνθρακα, μονοξείδιο του άνθρακα, οξείδιο του αζώτου κ.λπ. Ως εκ τούτου, μόνο συγκεκριμένα “παράθυρα” (οι υποπεριοχές των 3-5 και 8-12 μm) επιτρέπουν ικανοποιητική διάδοση. Στην Εικόνα 1 απεικονίζεται η μεταδοτικότητα (transmittance) της ατμόσφαιρας σε 1 ναυτικό μίλι στο επίπεδο της θαλάσσης [2]. Η μεταδοτικότητα γενικώς βελτιώνεται καθώς αυξάνει το υψόμετρο.
Όσον αφορά την περίπτωση ενός αεροπλάνου, αυτό παρουσιάζει μία περίπλοκη θερμική υπογραφή, η οποία προέρχεται από τα ακόλουθα τμήματα:
- Τα θερμά τμήματα του κινητήρα (κεντρικό τμήμα του κινητήρα, οπίσθια όψη του στροβίλου, σώμα και εσωτερική επιφάνεια των πτερυγίων ελέγχου του ακροφυσίου εξαγωγής).
- Τα καυσαέρια του κινητήρα (εκπομπές από την καύση του καυσίμου, κυρίως διοξείδιο του άνθρακα και υδρατμοί).
- Την δομή του αεροσκάφους, που περιλαμβάνει όλες τις εξωτερικές επιφάνειες των πτερύγων, της ατράκτου, της καλύπτρας κ.λπ., καθώς και ηλιακές και επίγειες αντανακλάσεις και το κρουστικό κύμα Mach (αεροδυναμική θέρμανση).
Επομένως, κάθε όχημα που πετάει στον αέρα εκπέμπει αναπόφευκτα θερμική ακτινοβολία, η οποία μπορεί να ανιχνευθεί, εάν παρουσιάζει επαρκή αντίθεση με το ψυχρό υπόβαθρο.
Η πιο συνηθισμένη διάταξη που εκμεταλλεύεται αυτό το χαρακτηριστικό εναντίον ενός στόχου αέρος είναι ο πύραυλος υπέρυθρης αναζήτησης, ο οποίος ανιχνεύει τη θερμότητα και έχει ιστορία πάνω από μισό αιώνα. Εκτός από την καθοδήγηση με βάση της θερμότητα, τα Συστήματα Έρευνας και Ιχνηλάτησης Υπέρυθρης Ακτινοβολίας (InfraRed Search & Track ή IRST, όπως θα αναφέρονται στη συνέχεια) έχουν χρησιμοποιηθεί από τα τέλη της δεκαετίας του ’50 για ανίχνευση και στόχευση, στο πεδίο αέρος-αέρος. Τα συστήματα IRST, ως παθητικοί αισθητήρες, παρέχουν σημαντικά πλεονεκτήματα, καθώς δεν προειδοποιούν τον αντίπαλο. Επιπλέον, δεν μπορούν να παρεμβληθούν τόσο εύκολα όσο το ραντάρ. Προσφέρουν επίσης καλύτερη γωνιακή ανάλυση σε σχέση με το ραντάρ, αλλά δεν μπορούν να μετρήσουν απευθείας την απόσταση.
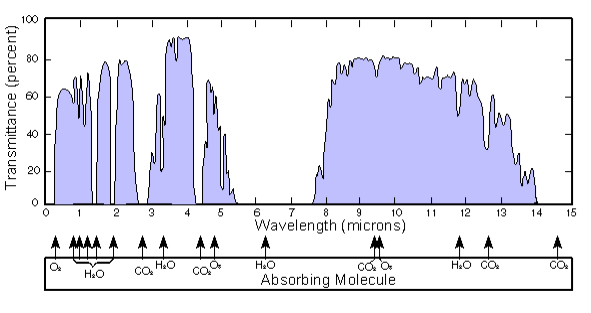
Εικόνα 1: Η μεταδοτικότητα (transmittance) IR της ατμόσφαιρας στο επίπεδο της θαλάσσης για διάστημα 1 ναυτικού μιλίου [2]. Τα πιο χρήσιμα «παράθυρα» είναι το μεσαίου κύματος (mid-wave IR – MWIR) με μήκος κύματος 3-5 μm και το μακρού κύματος (long wave IR – LWIR) με μήκος κύματος 8-12 μm.
Στο σύγχρονο πεδίο μάχης που διεξάγεται σε αέρα, θάλασσα και ξηρά, εκτός από τα μαχητικά αεροσκάφη, η τεχνολογία IRST χρησιμοποιείται σε ναυτικά συστήματα αεράμυνας, καθώς και σε συστήματα προστασίας των αρμάτων μάχης (Active Protection Systems – APS). Με την αξιοποίηση της συγχώνευσης δεδομένων (data fusion) στα σύγχρονα συστήματα μάχης, καθίσταται δυνατή η επίτευξη σημαντικών βελτιώσεων στην αποτελεσματικότητα τους, με τον συνδυασμό, τη διασύνδεση και τη συσχέτιση δεδομένων από πολλούς αισθητήρες και πηγές, όπως το ραντάρ και το σύστημα IRST (απόσταση – γωνιακή ακρίβεια) [3].
Από την άλλη πλευρά, τα συστήματα υπέρυθρης ακτινοβολίας είναι πιο ευαίσθητα από τα ραντάρ σε αντίξοες καιρικές συνθήκες. Ως εκ τούτου, λαμβάνοντας υπόψη την πρόοδο της τεχνολογίας ραντάρ, τα συστήματα IRST εγκαταλείφθηκαν στις Η.Π.Α. πριν από 15-20 χρόνια, με το αξιοσέβαστο F-14D Tomcat να αποτελεί το τελευταίο μαχητικό εξοπλισμένο με IRST.
Τα αεροσκάφη (Α/Φ) χαμηλής παρατηρησιμότητας ή Stealth, πέραν της μειωμένης ραδιοδιατομής τους (Radar Cross Section – RCS), κάνουν χρήση τεχνικών που ελαττώνουν επίσης την θερμική τους υπογραφή. Τέτοιες τεχνικές είναι η χρήση κινητήρων χωρίς μετακαυστήρα (όπως στην περίπτωση του F-117 και του B-2), η χρήση στροβιλοανεμιστήρων κινητήρων (turbofan) με μεγάλο λόγο παράκαμψης (όπου η ροή παράκαμψης χρησιμοποιείται για να ψύξει τα καυσαέρια) και η τοποθέτηση των ακροφυσίων εξαγωγής στην άνω πλευρά, σε μία προσπάθεια απόκρυψης των θερμών καυσαερίων από κάτω (όπως στην περίπτωση του Β-2). Μερικά Α/Φ χρησιμοποιούν το καύσιμό τους ως ψυκτικό υγρό, μεταφέροντας πλεονάζουσα θερμότητα σε αυτό, όπως π.χ. το F-35. Παρ’ όλες αυτές τις προσπάθειες, είναι απλά αδύνατο να εξαφανιστεί στο υπέρυθρο φάσμα μία πηγή θερμότητας όπως ένα Α/Φ που πετά με μεγάλη ταχύτητα. Για τον λόγο αυτό, διαφαίνεται ότι τα συστήματα IRST αποτελούν μία προσέγγιση με προοπτικές εναντίον δυσδιάκριτων στόχων (“stealth”).
Εν αντιθέσει με τις Η.Π.Α., οι Ρώσοι δεν εγκατέλειψαν ποτέ το IRST, εξοπλίζοντας τα περισσότερα μαχητικά τους με τέτοια συστήματα, από τη δεκαετία του ’60. Οι Κινέζοι, οι οποίοι προοδεύουν γρήγορα στη σχεδίαση χαμηλής παρατηρησιμότητας, εξοπλίζουν το Chengdu J-20 και το Shenyang FC-31 με προηγμένα ηλεκτρο-οπτικά συστήματα, τα οποία εμφανίζουν ομοιότητες με τα αντίστοιχα του F-35. Επιπλέον, τις τελευταίες δεκαετίες, όλα τα σύγχρονα ευρωπαϊκά μαχητικά (Rafale, Eurofighter Typhoon, Gripen NG, τα οποία ανεπίσημα αναφέρονται και ως «euro-canards», καθώς διαθέτουν όλα ριναία πηδάλια ή canards) διαθέτουν συστήματα IRST τελευταίας γενιάς, με αυξημένες δυνατότητες. Μετά από αυτές τις εξελίξεις, οι οποίες μπορεί να θέσουν σε κίνδυνο το αμερικανικό πλεονέκτημα της τεχνολογίας χαμηλής παρατηρησιμότητας, οι Αμερικανοί πρόσφατα ανακάλυψαν εκ νέου τα συστήματα IRST, προσπαθώντας να καλύψουν την απόσταση από την Ευρώπη και τη Ρωσία.
Στην επόμενη ενότητα, παρουσιάζονται στρατιωτικές εφαρμογές της υπέρυθρης ακτινοβολίας και τα σύγχρονα συστήματα IRST. Στην 3η ενότητα, παρουσιάζεται το μαθηματικό μοντέλο ενός σύγχρονου IRST, με σκοπό την εκτίμηση της απόστασης αποκάλυψης ενός μοντέλου στροβιλοανεμιστήρα, υπό διάφορες καιρικές συνθήκες και πεδία θέασης. Τα αποτελέσματα της προσομοίωσης είναι εύλογα, ενώ υπό συγκεκριμένες συνθήκες δείχνουν εξαιρετικές επιδόσεις.
2 Ιστορικό Υπόβαθρο και Σύγχρονες Τάσεις
Όπως αναφέρθηκε, μία από τις πρώτες στρατιωτικές εφαρμογές που βασιζόταν στην υπέρυθρη ακτινοβολία ήταν ο πύραυλος υπέρυθρης αναζήτησης (“heat seeker”). Το πιο χαρακτηριστικό παράδειγμα είναι ο AIM-9 Sidewinder. Η ανάπτυξη ξεκίνησε αμέσως μετά τον 2ο Παγκόσμιο Πόλεμο, το 1946. Δέκα χρόνια αργότερα, ο AIM-9A/B είχε τεθεί σε παραγωγή. Αρχικά χρησιμοποιήθηκε από το Αμερικανικό Ναυτικό. Υπερέχοντας σε επιδόσεις από τον αντίστοιχο πύραυλο της Αμερικανικής Αεροπορίας, τον AIM-4 Falcon, τελικά χρησιμοποιήθηκε και στα μαχητικά της Αμερικανικής Αεροπορίας. Τα αρχικά μοντέλα (έως την έκδοση AIM-9J) χρησιμοποιούσαν αισθητήρα PbS στη ζώνη βραχέως κύματος (short-wave IR – SWIR, 1,9-2,6 μm), ενώ τα επόμενα μοντέλα (από τον AIM-9L έως τον AIM-9P) ήταν εξοπλισμένα με αισθητήρα InSb (MWIR, 4 μm), επιτρέποντας εμπλοκές ολικής θέασης (“all aspect”), δηλαδή επίθεση από όλες τις κατευθύνσεις, όχι μόνο από το οπίσθιο μέρος.
Με κάθε νέα έκδοση του ΑΙΜ-9, υπήρχαν βελτιώσεις που αφορούσαν κυρίως την εμβέλεια του πυραύλου και το σύστημα καθοδήγησης, καθώς η πιο προηγμένη τεχνολογία αισθητήρων επέτρεπε μεγαλύτερες αποστάσεις ανίχνευσης, ενώ ήταν πιο αποτελεσματική στην απόρριψη των αντιμέτρων υπερύθρων (InfraRed Counter Measures – IRCM), όπως οι θερμοβολίδες (flares). Η πιο πρόσφατη έκδοση είναι ο AIM-9X Block II, ο οποίος χρησιμοποιεί αισθητήρα διάταξης εστιακού επιπέδου (Focal Plane Array), στη ζώνη MWIR. Ο AIM-9X μπορεί να χρησιμοποιηθεί και ως όπλο επιφανείας-αέρος, εκτός από αέρος-αέρος. Άλλοι πύραυλοι αέρος-αέρος υπέρυθρης αναζήτησης είναι ο βρετανικός ASRAAM, ο IRIS-T (προέκυψε από ένα πολυεθνικό πρόγραμμα με επικεφαλής τη Γερμανία, στο οποίο συμμετείχε και η Ελλάδα), ο γαλλικός MICA IR (πύραυλος μέσης εμβελείας, με data link, αισθητήρα δύο ζωνών και κατευθυνόμενη ώση) και ο ρωσικός R-73. Αρκετοί σύγχρονοι πύραυλοι διαθέτουν δύο αισθητήρες, καλύπτοντας και τη ζώνη LWIR πέραν της συνήθους MWIR, ώστε να είναι σε θέση να ξεχωρίσουν τον στόχο από θερμοβολίδες ή άλλα “δολώματα”, χρησιμοποιώντας στοιχεία HgCdTe (Mercury Cadmium Telluride).
Μία παρεμφερής οικογένεια πυραύλων είναι τα φορητά αντιαεροπορικά συστήματα, γνωστά και ως MANPADS (Man-Portable Air-Defence Systems), τα οποία είναι πύραυλοι εδάφους-αέρος που εκτοξεύονται από φορητούς εκτοξευτήρες εναντίον χαμηλά ιπτάμενων στόχων (έως 10.000 ft), όπως ελικόπτερα. Οι περισσότεροι εξ αυτών των πυραύλων χρησιμοποιούν υπέρυθρη αναζήτηση, με συστήματα καθοδήγησης παρόμοια με αυτά των πυραύλων αέρος-αέρος που περιεγράφησαν ανωτέρω, συμπεριλαμβανομένης της διάταξης εστιακού επιπέδου για τα συστήματα τελευταίας γενεάς. Παραδείγματα της κατηγορίας αυτής είναι ο αμερικανικός Stinger (οι τελευταίες εκδόσεις του εκμεταλλεύονται επίσης και την υπεριώδη ακτινοβολία – UV), ο γαλλικός Mistral και τα ρωσικά συστήματα Igla και Strela. Η μέγιστη εμβέλεια των πυραύλων αυτών είναι της τάξης των 4 ναυτικών μιλίων.
Μία ακόμα οικογένεια ηλεκτρο-οπτικών συστημάτων είναι τα συστήματα FLIR (Forward Looking IR). Αυτά είναι συνήθως πιο περίπλοκες κάμερες θερμικής απεικόνισης, στη ζώνη MWIR, για χρήση κυρίως αέρος-εδάφους. Παρέχουν υπέρυθρη εικόνα που χρησιμοποιείται για σκοπούς ναυτιλίας, επιτήρησης, αναγνώρισης και στόχευσης, κατά τη διάρκεια ημέρας ή νύχτας. Παραδείγματα συστημάτων που περιλαμβάνουν υποσύστημα FLIR είναι το σύστημα LANTIRN (αποτελούμενο από τα ατρακτίδια ναυτιλίας AN/AAQ-13 και στόχευσης AN/AAQ-14), τα ατρακτίδια AN/AAQ-33 Sniper Advanced Targeting Pod, AN/ASQ-228 Advanced Targeting FLIR (ATFLIR), AN/AAQ-28(V) LITENING, το γαλλικό Damocles, καθώς και το TADS/PNVS (Target Acquisition and Designation Sights, Pilot Night Vision System) των επιθετικών ελικοπτέρων AH-64 Apache. Τα περισσότερα από τα παραπάνω συστήματα είναι επίσης εξοπλισμένα με κάμερες υψηλής ανάλυσης ορατού φάσματος, διάταξη laser για αποστασιομέτρηση, καθώς και διάταξη κατάδειξης laser για σκοπούς στόχευσης. Πολλά ελικόπτερα είναι εφοδιασμένα με συστήματα FLIR, προκειμένου να εκτελούν παρακολούθηση ημέρα και νύχτα.

Εικόνα 2: Ένα Phantom F-4B με την κεφαλή του υπέρυθρου αισθητήρα AAA-4, τοποθετημένη κάτω από το ραντάρ. Λόγω των βελτιώσεων στους AIM-9 Sidewinder και της περιορισμένης χρησιμότητάς του, ο αισθητήρας αυτός δεν διατηρήθηκε σε επόμενες εκδόσεις του F-4 [4].
Τα συστήματα IRST είναι συσκευές που δεν παρέχουν εικόνα αλλά χρησιμοποιούνται για σκοπούς ανίχνευσης και στόχευσης αέρος-αέρος. Αρχικά εκμεταλλεύονταν τη ζώνη LWIR, ενώ μεταγενέστερα LWIR ή MWIR. Τα πρώτα συστήματα IRST εμφανίσθηκαν γύρω στο τέλος της δεκαετίας του ’50 – αρχές δεκαετίας του ’60, σε αμερικανικά Α/Φ αναχαίτισης, όπως τα F-101 Voodoo, F-102 Delta Dagger και F-106 Delta Dart. Χρησιμοποιήθηκαν επίσης στο F-8E Crusader, το F-4 Phantom (βλ. Εικόνα 2) και στα σουηδικά J-35A και J-35F-2 Draken. Αυτά ήταν απλοί αισθητήρες υπέρυθρης ακτινοβολίας, που πραγματοποιούσαν οριζόντια σάρωση και παρείχαν στοιχεία σε μια οθόνη κάτω από την κύρια οθόνη ραντάρ. Οποιοδήποτε υπέρυθρο σήμα λαμβανόταν από τον αισθητήρα, θα δημιουργούσε μία ένδειξη στην οθόνη, επιτρέποντας στον Ιπτάμενο να θέσει χειροκίνητα το ραντάρ στη σχετική γωνία, προσπαθώντας να ανιχνεύσει τον στόχο από το ραντάρ. Αυτά τα πρωτόγονα συστήματα είχαν περιορισμένη χρησιμότητα και εγκαταλείφθηκαν όταν εμφανίστηκαν πιο προηγμένα συστήματα ραντάρ.

Εικόνα 3: Ένα F-14D Super Tomcat του U.S. Navy ετοιμάζεται να συνδεθεί με ένα Α/Φ εναέριου ανεφοδιασμού, με προτεταμένο το ακροσωλήνιο λήψης καυσίμου. Κάτω από τον κώνο του ραντάρ, διακρίνονται τα δύο ηλεκτρο-οπτικά συστήματα, το AN/AXX-1 Television Camera Set (TCS) και το IRST AN/AAS-42 (με τον σκουρόχρωμο θόλο). Το Α/Φ απεσύρθη από την ενεργό υπηρεσία το 2006. Μέχρι την έλευση του F-35, το F-14D ήταν το τελευταίο αμερικανικό μαχητικό εξοπλισμένο με IRST.
Στην δεκαετία του ’90 αναπτύχθηκε το IRST AN/AAS-42, ένας προηγμένος αισθητήρας γραμμικής διάταξης σάρωσης (Scanned Linear Array), στη ζώνη LWIR (αν και αρχικά υπήρχε και ανάλογη διάταξη στη ζώνη MWIR). Χρησιμοποιήθηκε στο Α/Φ F-14D Tomcat (γνωστό και ως Super Tomcat). Ήταν τοποθετημένο κάτω από το ραντάρ και διέθετε έξι διαφορετικές λειτουργίες, παρόμοιες με το ραντάρ AN/APG-71. Σύμφωνα με την αμυντική επιθεώρηση Jane’s, ένα ειδικό πλαίσιο το οποίο ήταν αδρανειακά σταθεροποιημένο στους 3 άξονες επέτρεπε στο σύστημα να ερευνά με ακρίβεια πολλαπλούς όγκους σάρωσης, είτε αυτόματα, είτε υπό τον έλεγχο του πιλότου. Αυτός ήταν ένας αρκετά ικανός αισθητήρας IRST, «σχεδιασμένος να επιτρέπει την πολλαπλή παρακολούθηση στόχων που εκπέμπουν θερμική ενέργεια σε εξαιρετικά μεγάλες αποστάσεις για την επαύξηση της πληροφορίας που παρέχεται από συμβατικά τακτικά ραντάρ». Νεότερες εκδόσεις αυτού του αισθητήρα τοποθετήθηκαν στη συνέχεια σε μαχητικά εξαγωγής, όπως το F-15SG Eagle που παρήγγειλε η Σιγκαπούρη, ως μέρος του συστήματος αισθητήρων «TIGER Eyes».
Όμως, το F-14D απεσύρθη από το USN το 2006. Την ίδια εποχή, η USAF ήταν απρόθυμη να υιοθετήσει έναν αισθητήρα IRST, αποφασίζοντας να μην χρηματοδοτήσει την ανάπτυξη του AIRST (Advanced IRST), το οποίο θα εξόπλιζε το F-22 Raptor. Δεδομένου ότι τότε δεν υπήρχε άλλο ανάλογο σύστημα στο αμερικανικό οπλοστάσιο, η απόφαση αυτή άφησε για μερικά χρόνια τις ΗΠΑ χωρίς κάποιο μαχητικό που να διαθέτει IRST.
Η κατάσταση αυτή πλέον αλλάζει και οι ΗΠΑ φαίνεται ότι επαν-ανακαλύπτουν το IRST:
- Το F-35 είναι εξοπλισμένο με δύο ηλεκτρο-οπτικά συστήματα, το Κατανεμημένο Σύστημα Διαφράγματος (Distributed Aperture System – DAS) AN/AAQ-37 και το Ηλεκτρο-οπτικό σύστημα σκόπευσης (Electro-Optical Targeting System – EOTS) AN/AAQ-40. Το DAS είναι ένα σύστημα που λειτουργεί σε δύο ζώνες (MWIR και LWIR) και περιλαμβάνει 6 υπέρυθρους αισθητήρες γύρω από το αεροπλάνο για σφαιρική κάλυψη, παρέχοντας εικόνα ημέρα και νύχτα, ενώ παράλληλα δρα ως ένα σύστημα αποκάλυψης πυραύλου (Missile Approach Warning System) καθώς και ως IRST. Το EOTS συνδυάζει λειτουργία FLIR και IRST, κυρίως για σκοπούς αέρος-εδάφους, ενώ μοιράζεται πολλές κοινές βαθμίδες με το Sniper Advanced Targeting Pod, αν και είναι τοποθετημένο εσωτερικά και όχι ως ατρακτίδιο. Ένα αναβαθμισμένο EOTS έχει προταθεί να αντικαταστήσει το υφιστάμενο σε νεότερες εκδόσεις του F-35, το οποίο θα διαθέτει διάφορες βελτιώσεις, συμπεριλαμβανομένης της λειτουργίας στη ζώνη SWIR.
- Το 2015, το USN ενέκρινε την παραγωγή χαμηλού ρυθμού του συστήματος αισθητήρα IRST21, με σκοπό να εξοπλίσει τα F/A-18 Super Hornet με IRST. Ο αισθητήρας IRST21 βασίζεται στο παλαιότερο IRST AN/AAS-42 και τοποθετείται στην εμπρόσθια πλευρά της κεντρικής εξωτερικής δεξαμενής καυσίμου του F/A-18E/F. Ο IRST21 είναι και ο κύριος αισθητήρας του Legion Pod, ενός συστήματος αισθητήρα πολλαπλών λειτουργιών, το οποίο υποστηρίζει συνεργατικές επιχειρήσεις σκόπευσης. Το 2017, το Legion Pod επιλέχθηκε για τα F-15C των ΗΠΑ.
- Παράλληλα, παρουσιάστηκε το IRST OpenPod, ως μία μελλοντική λύση που παρέχει στόχευση, επικοινωνίες, LIDAR και άλλες επιλογές. Το OpenPod αποτελεί εξέλιξη του ατρακτιδίου LITENING, με την ενσωμάτωση τεχνολογίας IRST που αναπτύχθηκε στην Ευρώπη για το PIRATE και το SkyWard.

Εικόνα 4: Ένα F-16 εξοπλισμένο με το σύστημα αισθητήρα Legion Pod. Η εγκατάσταση και οι σχετικές πτητικές δοκιμές έχουν ολοκληρωθεί για το F-16 (εικόνα από την ιστοσελίδα του κατασκευαστή).
Όσον αφορά την Ευρώπη, όλα τα σύγχρονα Ευρωπαϊκά μαχητικά διαθέτουν εξελιγμένα συστήματα IRST, ως ακολούθως (με την σειρά που εμφανίσθηκαν):
- Το γαλλικό Rafale διαθέτει το OSF (Optronique Secteur Frontal ή Front Sector Optronics – FSO), το οποίο περιλαμβάνει IRST/FLIR δύο ζωνών, κάμερα TV και αποστασιόμετρο laser, για επιτήρηση και στόχευση αέρος-αέρος και αέρος-εδάφους. Αποτέλεσε το πρώτο δυτικό σύστημα IR δύο ζωνών (MWIR και LWIR). Όμως, στο τρέχον στάνταρ του Rafale (F3), το OSF διατηρεί μόνο το υποσύστημα TV/Laser, καθώς το υποσύστημα IR θεωρείται απαρχαιωμένο (obsolete) και πρόκειται να αντικατασταθεί με ένα αναβαθμισμένο στο επόμενο στάνταρ F4.
- Το Eurofighter Typhoon χρησιμοποιεί το Passive InfraRed Airborne Track Equipment (PIRATE) της κοινοπραξίας EuroFirst, ένα σύστημα IRST/FLIR διπλής ζώνης, το οποίο μπορεί να αποκαλύψει και να ιχνηλατήσει στόχους αέρος και εδάφους και να παράσχει απεικόνιση FLIR για πτήση σε χαμηλά ύψη και ναυτιλία παντός καιρού για επιχειρήσεις ημέρα και νύχτα. Αναφέρεται επίσης ότι εκτελεί παθητική αποστασιομέτρηση.
- Το JAS 39E/F Gripen NG διαθέτει το SkyWard το οποίο βασίζεται στην εμπειρία που αποκτήθηκε από το PIRATE του Eurofighter Typhoon. Το σύστημα αυτό χρησιμοποιεί έναν αισθητήρα διάταξης εστιακού επιπέδου (Focal Plane Array) στη ζώνη LWIR (με την δυνατότητα διπλής ζώνης ως ενδεχόμενη αναβάθμιση) και έχει αναφερθεί ότι είναι “ικανό να ανιχνεύει δυσδιάκριτους στόχους (χαμηλού RCS) σε αποστάσεις συμβατές με την εξαπόλυση πυραύλου πέραν του οπτικού πεδίου (Beyond Visual Range)”. Το SkyWard υποστηρίζεται ότι παρουσιάζει αντι-στελθ ικανότητες, καθώς “ορισμένες βαφές απορρόφησης υπέρυθρης ακτινοβολίας προκαλούν μεγαλύτερη τριβή από τις συνήθεις επιφάνειες και αυτό προκαλεί αεροδυναμική τριβή την οποία μπορεί να ανιχνεύσει το IRST”, σύμφωνα με εκπροσώπους της εταιρείας [5]. Μπορεί επίσης να εκτελέσει “κινητική αποστασιομέτρηση” (kinetic ranging), όπου το φέρον Α/Φ πραγματοποιεί έναν συγκεκριμένο ελιγμό και η απόσταση του στόχου υπολογίζεται από την μεταβολή της γωνίας αζιμουθίου του στόχου. Η απόσταση του στόχου μπορεί να εκτιμηθεί και με τη βοήθεια ενός άλλου Gripen μέσω τριγωνισμού, με ανταλλαγή δεδομένων μέσω του ασύρματου δικτύου TAU-Link (Tactical Air Unit data link).

Εικόνα 5: Το 101KS-V IRST του Sukhoi Su-57 (παλαιότερα γνωστό ως T-50 ή PAK-FA) φαίνεται μπροστά και δεξιά από την καλύπτρα (εικόνα από την ιστοσελίδα της κατασκευάστριας UAC).
Στην Ρωσία, τα μαχητικά τους, όπως το MiG-23, το Su-27 και το MiG-31, εξοπλίζονται με IRST από την δεκαετία του ’60. Τα συστήματα IRST χρησιμοποιούνται στα ρωσικά μαχητικά ως αντιστάθμισμα έναντι των πιο εξελιγμένων ραντάρ των δυτικών μαχητικών. Με τον τρόπο αυτό, θα ήταν δυνατή η πρόσκτηση εχθρικού Α/Φ από τα ρωσικά μαχητικά σε επαρκείς αποστάσεις, χωρίς να προειδοποιείται το εχθρικό Α/Φ. Σύγχρονα ρωσικά συστήματα IRST είναι το OLS-27/30/35 για την οικογένεια του Flanker και το OLS-29 για την οικογένεια Mig-29/35. Επίσης, το 101KS-V (OLS-50M) είναι ένα εξελιγμένο IRST που αναπτύσσεται ως μέρος του ηλεκτρο-οπτικού συστήματος 101KS Atoll για το μαχητικό 5ης γενεάς Su-57. Το IRST 101KS-V αναφέρεται ότι βασίζεται στην τεχνολογία υπέρυθρου φωτοφωρατή κβαντικού φρέατος (Quantum Well Infrared Photodetector – QWIP), η οποία λειτουργεί σε πολύ ευρύτερο φασματικό εύρος ζώνης, το οποίο περιλαμβάνει την ζώνη πολύ μακρού κύματος 15 μm, ώστε να ανιχνεύει πολύ ψυχρούς στόχους.
Η Κίνα κινείται ταχέως στον τομέα των μαχητικών 5ης γενεάς για να καλύψει την απόσταση, αναπτύσσοντας το Chengdu J-20 και το Shenyang FC-31, κατ’ αναλογία με τον συνδυασμό F-22 και F-35. Το ηλεκτρο-οπτικό σύστημα στόχευσης EOTS-89 και το IRST EORD-31 αναπτύσσονται για τα J-20 και J-31. Διαφημιστικά φυλλάδια αναφέρουν αποστάσεις αποκάλυψης 150 km για το B-2 και 110 km για το F-22. Αμφότερα τα J-20 και FC-31, αναφέρεται ότι διαθέτουν επίσης κατανεμημένο σύστημα διαφράγματος παρόμοιο με το DAS του F-35.
3 Μοντελοποίηση του Κινητήρα, των Καιρικών Συνθηκών και του Αισθητήρα IRST
Λαμβάνοντας υπόψη τα ανωτέρω, ανακύπτει το ακόλουθο ερώτημα: ποια είναι η μέγιστη απόσταση από την οποία μπορεί να ανιχνευθεί ένα δυσδιάκριτο μαχητικό τεχνολογίας στελθ από έναν αισθητήρα IRST; Επιπλέον, ποιες είναι οι πιο σημαντικές παράμετροι που επηρεάζουν την απόσταση αυτή;
Με σκοπό την απάντηση των ερωτημάτων αυτών, έγιναν τα ακόλουθα βήματα:
- Μοντελοποίηση του κινητήρα του Α/Φ – στόχου, με βάση τα χαρακτηριστικά ενός τυπικού στροβιλοανεμιστήρα (turbofan), όπως ο κινητήρας F135 του F-35.
- Ανάλυση των καιρικών συνθηκών και της ατμοσφαιρικής μεταδοτικότητας, χρησιμοποιώντας τον κώδικα MODTRAN.
- Ανάλυση του αισθητήρα IRST, δηλαδή του φωτοανιχνευτή (detector), του οπτικού συστήματος κ.λπ., χρησιμοποιώντας χαρακτηριστικά και παραμέτρους που προσιδιάζουν στα συστήματα PIRATE ή SkyWard.
- Εκτίμηση της μέγιστης απόστασης αποκάλυψης με βάση τη διαφορά ραδιομετρικής έντασης (radiant intensity) μεταξύ του στόχου και του υποβάθρου.
Ο στροβιλοανεμιστήρας είναι σήμερα ο πιο κοινός τύπος αεροκινητήρα, προσφέροντας περισσότερη ώση και χαμηλότερη κατανάλωση καυσίμου σε σχέση με παλαιότερους στοβιλωθητές κινητήρες (turbojet), στις συνήθεις συνθήκες πτήσης (υψηλή υποηχητική έως χαμηλή υπερηχητική ταχύτητα). Υπάρχουν διάφορες αναλύσεις πάνω στη λειτουργία ενός στροβιλοανεμιστήρα, όπως π.χ. [6] [7]. Ο λόγος παράκαμψης (bypass ratio), δηλαδή ο λόγος της ροής μάζας αέρα που παρακάμπτει τον θάλαμο καύσης του κινητήρα προς τη ροή μάζας αέρα που διέρχεται από τον θάλαμο καύσης, για ένα μαχητικό αεροσκάφος είναι μικρότερος από 1:1, π.χ. 0,36:1 για τον κινητήρα Pratt & Whitney F100, που προωθεί το F-16 και το F-15, ή 0,57:1 για τον F135-PW-100 του Α/Φ F-35Α CTOL (συμβατικής απογείωσης και προσγείωσης). Τα μαχητικά αεροσκάφη χρησιμοποιούν κινητήρες με χαμηλούς λόγους παράκαμψης, πράγμα το οποίο αποτελεί έναν συμβιβασμό μεταξύ της οικονομίας καυσίμου και των απαιτήσεων μάχης, όπως ο υψηλός λόγος ισχύος προς βάρος, η υπερηχητική απόδοση και η δυνατότητα χρήσης μετακαυστήρα. Επιπλέον, η ροή αέρα παράκαμψης ψύχει τα καυσαέρια, μειώνοντας τη συνολική υπέρυθρη υπογραφή του αεροσκάφους.
Όμως, η θερμοκρασία των καυσαερίων δεν είναι πολύ σημαντική σε μεγάλες αποστάσεις, επειδή τα κύρια συστατικά τους, το διοξείδιο του άνθρακα και οι υδρατμοί, παίζουν σημαντικό ρόλο και στην απορρόφηση της υπέρυθρης ακτινοβολίας. Με άλλα λόγια, η ακτινοβολία των καυσαερίων εκπέμπεται σε διακριτές συχνότητες, οι οποίες εξασθενούν πολύ καθώς η απόσταση μεταξύ του στόχου και του IRST αυξάνεται [8]. Εκτιμάται ότι, σε μεγάλες αποστάσεις, η ακτινοβολία των καυσαερίων που προσπίπτει στον αισθητήρα του IRST συνεισφέρει στην ανίχνευση του στόχου λιγότερο από 5%. Σε μικρές όμως αποστάσεις, η εκπεμπόμενη ακτινοβολία δεν έχει ακόμα εξασθενήσει, οπότε τα καυσαέρια αποτελούν την κύρια πηγή ακτινοβολίας για τους πυραύλους υπέρυθρης αναζήτησης. Για παράδειγμα, οι αισθητήρες των MANPADS ή των πυραύλων αέρος-αέρος εμφανίζουν την βέλτιστη απόδοση στο μήκος κύματος των 4,35 μm, το οποίο αντιστοιχεί στην ακτινοβολία που εκπέμπεται από το διοξείδιο του άνθρακα [8].
Στην παρούσα προσέγγιση, το τελευταίο στάδιο του στροβίλου και η εσωτερική επιφάνεια του ακροφυσίου εξαγωγής αποτελούν τις κύριες πηγές ακτινοβολίας. Ο κινητήρας θεωρείται ότι λειτουργεί σε ξηρή ώση (χωρίς χρήση μετακαυστήρα). Όσον αφορά το F-35, η επιφάνεια του ακροφυσίου του κινητήρα F135 εκτιμάται σε 0,32-0,72 m². Για την προσομοίωση, το άνοιγμα του ακροφυσίου θεωρήθηκε ότι είναι 0,51 m².
3.1 Νόμος του Beer
Σύμφωνα με τον νόμο του Beer (ή νόμο Beer-Lambert):

όπου t είναι η μεταδοτικότητα (transmittance), α είναι ο συντελεστής του μοντέλου καιρού (ή συντελεστής απόσβεσης), που εξαρτάται από τις καιρικές συνθήκες που επικρατούν στην περιοχή και R είναι η απόσταση του στόχου από τον αισθητήρα. Εκτός από τις καιρικές συνθήκες, ο συντελεστής εξαρτάται από το “ατμοσφαιρικό παράθυρο” όπου ο αισθητήρας επιδεικνύει τη καλύτερη απόδοση. Για την προσομοίωση, εξετάζεται η περίπτωση IRST που λειτουργεί στην περιοχή MWIR, δηλαδή στο ατμοσφαιρικό παράθυρο 3-5 μm. Όσον αφορά τις ατμοσφαιρικές συνθήκες, εξετάστηκαν οι ακόλουθες περιπτώσεις:
- συνθήκες ξηρασίας (α = 0,05),
- καθαρή ατμόσφαιρα (α = 0,1),
- ελαφρά σκόνη ή ομίχλη (α = 0,4),
- βροχόπτωση (α = 0,8),
- έντονη βροχόπτωση (α = 1,2).
3.2 Η Ουράνια Ακτινοβολία (Sky Radiation)
Η ουράνια ακτινοβολία αποτελεί έναν σημαντικό παράγοντα για την προσομοίωση, λαμβάνοντας υπόψη ότι και αυτή καταφθάνει στον αισθητήρα ως θόρυβος, μειώνοντας την αντίθεση (contrast) μεταξύ του στόχου και του υποβάθρου. Το γνωστό μοντέλο MODTRAN (MODerate resolution atmospheric TRANsmission) χρησιμοποιήθηκε για την προσομοίωση του μοντέλου καιρικών συνθηκών. Ο κώδικας MODTRAN υπολογίζει την ατμοσφαιρική φασματική μεταδοτικότητα και τις εκπομπές, σε ευθεία γραμμή. Χρησιμοποιήθηκαν οι ακόλουθες παράμετροι – ρυθμίσεις:
- Χειμώνας μεσαίου γεωγραφικού πλάτους
- Ύψος: 10 Km (λίγο περισσότερο από 30.000 ft)
- Ηλιακή ζενίθια γωνία: 90o
- Ορατότητα: 10 Km
- Τύπος αερολυμάτων (aerosol mode): αγροτικής προέλευσης (rural)

Εικόνα 6: Στο ανωτέρω διάγραμμα, το οποίο προκύπτει από τον κώδικα MODTRAN, ως τιμή ουράνιας ακτινοβολίας μπορεί να θεωρηθεί η εξής: Ε = 2·10-5 W/cm2/micron/sr. Αυτή είναι μία συντηρητική προσέγγιση, καθώς στο παράθυρο 3-4,6 μm, η ουράνια ακτινοβολία είναι μικρότερη από την τιμή αυτή.
3.3 Απαιτήσεις Συστήματος
Ακολουθώντας μία προσέγγιση παρόμοια με αυτή του ραντάρ για ανίχνευση σήματος μέσα σε θόρυβο, υπάρχουν συγκεκριμένες απαιτήσεις που αφορούν την απόδοση ενός IRST. Πιο συγκεκριμένα, η πιθανότητα εντοπισμού (Pd) του στόχου θα πρέπει να είναι υψηλότερη από 95% και ο ρυθμός εσφαλμένων συναγερμών (FAR – False Alarm Rate) θα πρέπει να είναι μία φορά ανά ώρα [10]:
 Από το διάγραμμα της πιθανότητας εντοπισμού για δεδομένες τιμές FAR (π.χ. εικ. 4.160 του [10]), μπορεί κανείς να βρει τον απαιτούμενο λόγο σήματος προς θόρυβο SNR (Signal to Noise Ratio). Η τιμή SNR που ικανοποιεί τις προαναφερθείσες απαιτήσεις είναι 5,8.
Από το διάγραμμα της πιθανότητας εντοπισμού για δεδομένες τιμές FAR (π.χ. εικ. 4.160 του [10]), μπορεί κανείς να βρει τον απαιτούμενο λόγο σήματος προς θόρυβο SNR (Signal to Noise Ratio). Η τιμή SNR που ικανοποιεί τις προαναφερθείσες απαιτήσεις είναι 5,8.
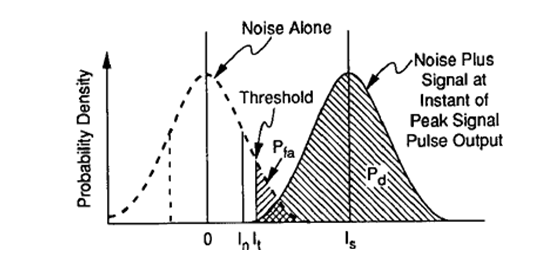
Εικόνα 7: Ανίχνευση στόχου σε περιβάλλον θορύβου [10].
3.4 Το Μοντέλο IRST
Ένας σύγχρονος αισθητήρας IRST θα περιελάμβανε μία διάταξη 640×512 φωρατών (detectors), ενώ σύμφωνα με το [11], η επόμενη γενιά θα έχει μία διάταξη μεγέθους 1024×1024. Υποθέτουμε ότι έχουμε μία τυπική διάταξη 640×512. Το πλαίσιο (frame) που μπορεί να δει ένα IRST εξαρτάται από το οπτικό πεδίο (field of view). Οι ακόλουθες τρεις περιπτώσεις οπτικού πεδίου εξετάστηκαν στην προσομοίωση, οι οποίες είναι αυτές που αναφέρονται για το IRST SkyWard [12]:
- Ευρύ οπτικό πεδίο (WFOV – Wide Field Of View): 30o × 24o
- Μεσαίο οπτικό πεδίο (MFOV – Medium Field Of View): 16o × 12.8o
- Στενό οπτικό πεδίο (NFOV – Narrow Field Of View): 8o × 6,4o
Όσο πιο ευρύ είναι το οπτικό πεδίο, τόσο ευκολότερο είναι να κοιτάξει κανείς προς την κατεύθυνση του στόχου αλλά τόσο περισσότερη ουράνια ακτινοβολία (δηλαδή θόρυβος) θα βρίσκεται εντός του πλαισίου, μειώνοντας την αντίθεση. Από την άλλη πλευρά, ένα στενό οπτικό πεδίο θα παρέχει μια καλή αντίθεση, λόγω της λιγότερης ουράνιας ακτινοβολίας που εισέρχεται στο πλαίσιο, επιτρέποντας την ανίχνευση ενός στόχου από μακριά, υπό την προϋπόθεση όμως ότι ο αισθητήρας κοιτάζει προς τον στόχο. Επομένως, δεν υπάρχει μια τέλεια λύση αλλά μόνο ένας συμβιβασμός στο θέμα αυτό.
Κάθε πλαίσιο χωρίζεται σε εικονοστοιχεία (pixels), ανάλογα με την διάσταση της διάταξης του αισθητήρα. Ένας αισθητήρας με διάταξη 640×512 σημαίνει ότι αυτός είναι ο αριθμός των διακριτών στοιχείων οριζόντια και κάθετα. Όσο αυξάνει ο αριθμός των εικονοστοιχείων, το μέγεθος του καθενός μειώνεται, καθώς και η ουράνια ακτινοβολία που εισέρχεται στο αντίστοιχο στοιχείο ανίχνευσης. Στην προσομοίωση, η ακτινοβολία του στόχου θεωρείται ότι προσπίπτει σε ένα εικονοστοιχείο και όχι σε ένα σύνολο εικονοστοιχείων ή στην ενδιάμεση επιφάνεια. Με τον τρόπο αυτό, η συνολική ακτινοβολία του στόχου μπορεί να αξιοποιηθεί για σκοπούς ανίχνευσης. Επομένως, μία πιο πυκνή διάταξη (με περισσότερα εικονοστοιχεία) σημαίνει ότι λιγότερη ουράνια ακτινοβολία εισέρχεται σε κάθε εικονοστοιχείο, συμπεριλαμβανομένου και του εικονοστοιχείου της ανίχνευσης.
Σύμφωνα με το [13], σε ένα σύγχρονο IRST, το βήμα μεταξύ των εικονοστοιχείων (δηλαδή η απόσταση μεταξύ δύο παρακείμενων εικονοστοιχείων) είναι περίπου 16 μm. Υποθέτοντας ότι το μέγεθος κάθε εικονοστοιχείου είναι περίπου 15,52 μm (97% του βήματος), ο βαθμός κάλυψης της διάταξης εκτιμάται σε 0,94 (94%) [14], η οποία είναι μία ρεαλιστική προσέγγιση, αν και συντηρητική.
3.5 Εκτίμηση της Απόστασης Αποκάλυψης
Ακολουθώντας τη συλλογιστική του [15], η μέγιστη απόσταση R, στην οποία μπορεί να ανιχνευθεί ο στόχος, εκτιμάται σύμφωνα με τον ακόλουθο τύπο:
 όπου:
όπου:
- D0 είναι το ενεργό διάφραγμα (effective aperture) ή ενεργό διαμέτρημα (effective calibre) του οπτικού συστήματος. Εάν υποθέσουμε ότι το D0 είναι κυκλικό (και συνήθως είναι), τότε η διάμετρος d0 σχετίζεται με την εστιακή απόσταση (focal length) f και τον αριθμό διαφράγματος ανοίγματος ή αριθμό F# (f-number) του οπτικού συστήματος σύμφωνα με την εξίσωση:
 Στην προσομοίωση, χρησιμοποιήθηκαν οι ακόλουθες τρεις τιμές του d0, που αντιστοιχούν στις τρεις διαφορετικές περιπτώσεις οπτικού πεδίου (ευρύ, μεσαίο, στενό):
Στην προσομοίωση, χρησιμοποιήθηκαν οι ακόλουθες τρεις τιμές του d0, που αντιστοιχούν στις τρεις διαφορετικές περιπτώσεις οπτικού πεδίου (ευρύ, μεσαίο, στενό):
dw = 15,16 mm, dm = 28,4 mm, dn = 56,8 mm.
- t είναι ο συντελεστής μεταδοτικότητας (transmittance coefficient) της ατμόσφαιρας, όπως στην εξ. 1 (νόμος του Beer). Εξαρτάται από την απόσταση του στόχου και τις καιρικές συνθήκες [9].
- t0 είναι ο συντελεστής μεταδοτικότητας του ιδίου του οπτικού συστήματος. Για παράδειγμα, το PIRATE έχει 90 ανακλαστικές επιφάνειες που καθορίζουν τη συνολική εξασθένηση της εισερχόμενης ακτινοβολίας [16]. Έτσι, το t0 αντιστοιχεί στην περαιτέρω εξασθένηση της ακτινοβολίας του στόχου εντός του οπτικού συστήματος. Υποθέτοντας μία ενδιάμεση τιμή για το t0, τέθηκε t0= 0,78, αν και στα σύγχρονα οπτικά συστήματα επιτυγχάνονται ακόμα καλύτεροι (υψηλότεροι) συντελεστές μεταδοτικότητας.
- D* είναι η ειδική ανιχνευσιμότητα (specific detectivity ή spectral detectability), ένα χαρακτηριστικό των επιδόσεων για κάθε τεχνολογία φωρατή. Σύμφωνα με το [18], για το PIRATE, μία μέγιστη τιμή του D* θεωρείται ότι είναι 1,5·1011 cm⋅√Hz /W για το MWIR. Στην προσομοίωση, υποτέθηκε ότι το D* είναι ίσο με 1,4·1011 cm⋅√Hz /W για τους φωρατές. Μία εμπεριστατωμένη ανάλυση σχετικά με το D* παρέχεται στο [17].
- F# είναι ο αριθμός F# (f-number), δηλαδή ο λόγος της εστιακής απόστασης του οπτικού συστήματος προς την διάμετρο της διάταξης των φωρατών, όπως φαίνεται στην εξ. 5. Ο αριθμός F# και το μήκος κύματος σχετίζονται με το μέγεθος του οπτικού σημείου περιορισμένης διάθλασης, ως ακολούθως:
 όπου d είναι το μέγεθος του φωρατή και λ είναι το μέσο μήκος κύματος. Στην προσομοίωση, d = 15,52 μm και λ = 4,95 μm, οπότε ο αριθμός F# είναι περίπου 1,29.
όπου d είναι το μέγεθος του φωρατή και λ είναι το μέσο μήκος κύματος. Στην προσομοίωση, d = 15,52 μm και λ = 4,95 μm, οπότε ο αριθμός F# είναι περίπου 1,29.
- Η γωνία ω αναπαριστά το στιγμιαίο οπτικό πεδίο (IFOV – instantaneous field of view) ή τη γωνιακή ανάλυση του φωρατή. Για μικρές τιμές, το IFOV προσεγγίζεται ως ακολούθως:
 με d το μέγεθος του φωρατή και f την εστιακή απόσταση. Εάν ο ανωτέρω τύπος εφαρμοστεί στην συνολική διάταξη, τότε γίνεται:
με d το μέγεθος του φωρατή και f την εστιακή απόσταση. Εάν ο ανωτέρω τύπος εφαρμοστεί στην συνολική διάταξη, τότε γίνεται:
 Η οριζόντια διάσταση της διάταξης, για 640 φωρατές με βήμα 16 μm θα είναι 640×16 μm = 10,24 mm. Για τους 512 φωρατές, η κάθετη διάσταση της διάταξης θα είναι 512×16 μm = 8,192 mm. Οπότε, η (διαγώνια) διάσταση της διάταξης θα είναι (10,242 + 8,1922)1/2 mm = 13,1136mm. Το οπτικό πεδίο (FOV) δεν είναι σταθερό και εξαρτάται από την λειτουργία. Για παράδειγμα, για ευρύ οπτικό πεδίο, το FOV είναι 30° × 24°. Οπότε, η μέση γωνιακή ανάλυση είναι (302 + 242)1/2 = 38,41o ή 670,38 mrad. Έτσι, η εστιακή απόσταση για ευρύ οπτικό πεδίο (WFOV) από την εξ. 8 θα είναι f = 13,1136 mm / 0,67038 rad ή f = 19,56 mm. Σύμφωνα με την εξ. 7, το IFOV θα είναι 0,7934 mrad ή 0,0454°. Οι σχετικές παράμετροι μπορούν να υπολογισθούν με τον ίδιο τρόπο για MFOV και NFOV.
Η οριζόντια διάσταση της διάταξης, για 640 φωρατές με βήμα 16 μm θα είναι 640×16 μm = 10,24 mm. Για τους 512 φωρατές, η κάθετη διάσταση της διάταξης θα είναι 512×16 μm = 8,192 mm. Οπότε, η (διαγώνια) διάσταση της διάταξης θα είναι (10,242 + 8,1922)1/2 mm = 13,1136mm. Το οπτικό πεδίο (FOV) δεν είναι σταθερό και εξαρτάται από την λειτουργία. Για παράδειγμα, για ευρύ οπτικό πεδίο, το FOV είναι 30° × 24°. Οπότε, η μέση γωνιακή ανάλυση είναι (302 + 242)1/2 = 38,41o ή 670,38 mrad. Έτσι, η εστιακή απόσταση για ευρύ οπτικό πεδίο (WFOV) από την εξ. 8 θα είναι f = 13,1136 mm / 0,67038 rad ή f = 19,56 mm. Σύμφωνα με την εξ. 7, το IFOV θα είναι 0,7934 mrad ή 0,0454°. Οι σχετικές παράμετροι μπορούν να υπολογισθούν με τον ίδιο τρόπο για MFOV και NFOV.
• Δf είναι το ισοδύναμο εύρος ζώνης θορύβου του συστήματος, το οποίο μπορεί να εκφρασθεί ως ακολούθως [15]:
 όπου td είναι ο χρόνος δειγματοληψίας ή χρόνος παραμονής (dwell time). Για μία συχνότητα δειγματοληψίας 3 Hz, ο χρόνος παραμονής είναι 0,3333 sec και Δf είναι 1,5 Hz.
όπου td είναι ο χρόνος δειγματοληψίας ή χρόνος παραμονής (dwell time). Για μία συχνότητα δειγματοληψίας 3 Hz, ο χρόνος παραμονής είναι 0,3333 sec και Δf είναι 1,5 Hz.
- Η τιμή του SNR έχει υπολογισθεί ανωτέρω (στην ενότητα 3.3) και θα πρέπει να είναι ίση με 5,8.
- Jt είναι η εκπεμπόμενη ένταση του στόχου και του υποβάθρου, ενώ Jb είναι εκπεμπόμενη ένταση του υποβάθρου, στην περιοχή μήκους κύματος υπό εξέταση (3-5 μm). Αυτά υπολογίζονται ως ακολούθως, ξεκινώντας από το Jt [15]:
 όπου:
όπου:
σ = 5,67032 x 10-12 W · cm-2 · K-4 είναι η σταθερά Stefan-Boltzmann.
εt είναι ο συντελεστής εκπομπής του στόχου. Στην προσομοίωση: εt = 0,90
At είναι η επιφάνεια του στόχου, π.χ., το ακροφύσιο του F135. Στην προσομοίωση: At = 0,51 m2
Tt είναι η θερμοκρασία του στόχου. Η θερμοκρασία της εσωτερικής επιφάνειας του Α/Κ εκτιμάται σε Tt = 1.000 oK
nΔλ είναι ο συντελεστής εύρους ζώνης και υποδεικνύει ποιο ποσοστό της συνολικής εκπομπής του στόχου εκπέμπεται εντός του εύρους ζώνης υπό εξέταση. Στην προσομοίωση, θεωρείται ότι nΔλ = 0,31
Ο στόχος θεωρείται ότι είναι Λαμπερτιανή επιφάνεια (Lambertian surface), οπότε η ένταση της ακτινοβολίας διαιρείται με π.
- Σχετικά τώρα με την ένταση ακτινοβολίας του υποβάθρου , έχουμε:
 όπου:
όπου:
σ = 5,67032 x 10-12 W · cm-2 · K-4 είναι η σταθερά Stefan-Boltzmann.
εb είναι ο συντελεστής εκπομπής του στόχου. Στην προσομοίωση: εb = 0,90
ω·R2 είναι η επιφάνεια που καλύπτει το στιγμιαίο οπτικό πεδίο (IFOV) κατά τη στιγμή της ανίχνευσης, σε m2. Προφανώς, εξαρτάται από την απόσταση του στόχου από τον αισθητήρα. Επιπρόσθετα, το IFOV αλλάζει με τις τρεις διαφορετικές λειτουργίες στενού-μεσαίου-ευρέως πεδίου. Η ένταση ακτινοβολίας υποβάθρου λαμβάνεται από την περιοχή που καλύπτει το IFOV μείον την επιφάνεια του στόχου: ω·R2 – At.
Tb είναι η θερμοκρασία περιβάλλοντος στα 30.000 ft. Θεωρείται ότι Tb = 230 oK, σύμφωνα με τους επίσημους πίνακες των ΗΠΑ “U.S. Standard Atmosphere Heights and Temperatures”.
n’Δλ είναι συντελεστής εύρους ζώνης και υποδεικνύει ποιο ποσοστό της συνολικής εκπομπής του στόχου εκπέμπεται εντός του εύρους ζώνης υπό εξέταση. Ακολουθώντας μία ανάλογη προσέγγιση ως ανωτέρω, υποτίθεται ότι n’Δλ = 0,31.
4 Αποτελέσματα Προσομοίωσης
Σύμφωνα με το [19], μία μέτρηση της ικανότητας του IRST να ανιχνεύει έναν σημειακό στόχο είναι η αξιολόγηση του λόγου:
 όπου λ είναι το μήκος κύματος, F# ο αριθμός F# (f-number) και d η γραμμική διάσταση του εικονοστοιχείου φωρατή. Αυτός ο λόγος θα πρέπει να είναι μικρότερος από 0,5 για ένα σύστημα κατάλληλο για ανίχνευση. Για την παρούσα προσομοίωση, ο λόγος αυτός υπολογίσθηκε σε 0,41, αποδεικνύοντας ότι πρόκειται για ένα κατάλληλο σύστημα, όσον αφορά τις βασικές ποιοτικές απαιτήσεις.
όπου λ είναι το μήκος κύματος, F# ο αριθμός F# (f-number) και d η γραμμική διάσταση του εικονοστοιχείου φωρατή. Αυτός ο λόγος θα πρέπει να είναι μικρότερος από 0,5 για ένα σύστημα κατάλληλο για ανίχνευση. Για την παρούσα προσομοίωση, ο λόγος αυτός υπολογίσθηκε σε 0,41, αποδεικνύοντας ότι πρόκειται για ένα κατάλληλο σύστημα, όσον αφορά τις βασικές ποιοτικές απαιτήσεις.
Λαμβάνοντας υπόψη τα ανωτέρω μοντέλα και την ανάλογη συλλογιστική, τα αποτελέσματα για συγκεκριμένες καιρικές συνθήκες και οπτικά πεδία απεικονίζονται στον Πίνακα 1.

Πίνακας 1: Αποτελέσματα προσομοίωσης απόστασης αποκάλυψης IRST (σε km), σε μεγάλο ύψος. Ο κινητήρας του στόχου είναι σε ξηρή ώση (χωρίς μετάκαυση) και το IRST είναι πίσω από το Α/Φ – στόχο.
Από τα ανωτέρω αποτελέσματα, καθίσταται προφανές ότι, σε καλές καιρικές συνθήκες, ένας στόχος (π.χ. ένα F-35, όπως στην υπόψη περίπτωση) μπορεί να ανιχνευθεί σε αρκετά μεγάλη απόσταση, της τάξης των 100 km, ή ακόμα περισσότερο σε συνθήκες ξηρασίας. Ανάλογες αποστάσεις αποκάλυψης έχουν αναφερθεί για υπάρχοντα συστήματα σε πραγματικές δοκιμές [20], υποδεικνύοντας την αληθοφάνεια της προτεινόμενης προσέγγισης.
Καθώς οι καιρικές συνθήκες επιδεινώνονται, η απόδοση του IRST χειροτερεύει. Σε έντονη βροχόπτωση ή χιόνι, η απόσταση αποκάλυψης του IRST καθίσταται πολύ μικρή. Όμως, στις περισσότερες περιπτώσεις, η απόσταση αποκάλυψης του IRST είναι καλύτερη από την αναμενόμενη απόσταση αποκάλυψης ενός δυσδιάκριτου αεροσκάφους (στελθ) από ένα ραντάρ ενός τακτικού Α/Φ [21].
Το οπτικό πεδίο επηρεάζει σημαντικά την επίδοση. Καθώς το οπτικό πεδίο γίνεται πιο ευρύ, η αντίθεση μεταξύ του στόχου και του υποβάθρου μειώνεται και η απόδοση επιδεινώνεται. Από την άλλη, για στενό οπτικό πεδίο, η απόδοση είναι πολύ πιο καλή. Όμως, είναι πιο δύσκολο να χρησιμοποιήσει κανείς την στενή θέαση για έρευνα.
Σημειώνεται ότι η προτεινόμενη προσέγγιση λαμβάνει υπόψη μόνο τα θερμά στοιχεία του κινητήρα, όπως αυτά φαίνονται από πίσω, και όχι την αεροδυναμική τριβή. Ως μελλοντική εργασία, θα εξεταστεί το φαινόμενο της αεροδυναμικής τριβής των χειλέων προσβολής και των εισαγωγών του κινητήρα ως προς την ανίχνευση του IRST.
5 Συμπέρασμα
Τα συστήματα IRST παρέχουν μία εναλλακτική δυνατότητα ανίχνευσης εχθρικών Α/Φ. Παρέχουν συγκεκριμένα πλεονεκτήματα εν συγκρίσει με τα τυπικά τακτικά ραντάρ Α/Φ, όπως συγκεκαλυμμένη λειτουργία, ανοσία στην παρεμβολή και υψηλότερη γωνιακή ανάλυση. Σε μερικές περιπτώσεις, τα συστήματα IRST προσφέρουν επίσης πολύ μεγάλες αποστάσεις ανίχνευσης, ανταγωνιζόμενα τα συμβατικά ραντάρ. Από την άλλη, δεν μπορούν να μετρήσουν άμεσα την απόσταση, όπως τα ραντάρ. Όμως τα σύγχρονα IRST χρησιμοποιούν έμμεσες μεθόδους αποστασιομέτρησης, με παθητική μέτρηση της απόστασης.
Η ανάπτυξη των οπλικών συστημάτων, ιδίως των δυσδιάκριτων απειλών (στελθ), οδήγησαν στην ανανέωση του ενδιαφέροντος στα συστήματα IRST, τα οποία πλέον προσφέρουν πιο εξελιγμένη τεχνολογία αισθητήρων και καλύτερη επεξεργασία σήματος, σε σχέση με το παρελθόν. Οι ΗΠΑ φαίνονται να επανα-ανακαλύπτουν το IRST, προσπαθώντας να καλύψουν το χαμένο έδαφος σε σχέση με την Ευρώπη, τη Ρωσία και την Κίνα, παρά το γεγονός ότι είχαν αξιοποιήσει συστήματα IRST σχεδόν πριν από μισό αιώνα.
Με σκοπό την εξέταση των ενδεχόμενων επιχειρησιακών πλεονεκτημάτων ενός σύγχρονου συστήματος IRST για την ανίχνευση δυσδιάκριτων Α/Φ, η εργασία αυτή εξετάζει ένα μοντέλο κινητήρα που βασίζεται στον Pratt&Whitney F135 του F-35, ένα μοντέλο IRST με χαρακτηριστικά τελευταίας γενιάς, καθώς και μία μεθοδολογία εκτίμησης της μέγιστης απόστασης αποκάλυψης. Η προτεινόμενη μέθοδος εξετάστηκε σε ορισμένες περιπτώσεις, που αντιστοιχούν σε διαφορετικές παραμέτρους καιρικών συνθηκών και οπτικών πεδίων των αισθητήρων.
Οι αποστάσεις αποκάλυψης που υπολογίσθηκαν είναι αρκετά κοντά σε τιμές που αναφέρθηκαν σε πραγματικές δοκιμές, αποδεικνύοντας την εγκυρότητα της προτεινόμενης προσέγγισης. Τα αποτελέσματα υποδεικνύουν ότι η απόσταση αποκάλυψης επηρεάζεται από αρκετές παραμέτρους, κυρίως τις καιρικές συνθήκες και το οπτικό πεδίο. Όμως, στις περισσότερες περιπτώσεις, η απόδοση του IRST είναι αρκετά καλή, επιτρέποντας την αποκάλυψη στόχου σε επιχειρησιακά σημαντικές αποστάσεις, ανεξάρτητα από το εάν ο στόχος είναι στελθ ή όχι. Επομένως, το IRST αποδεικνύεται ότι είναι ένας πολύτιμος αισθητήρας, ο οποίος επαυξάνει σημαντικά την επίγνωση της επιχειρησιακής κατάστασης, ειδικά σε σχέση με δυσδιάκριτες απειλές, εναντίον των οποίων τα συμβατικά τακτικά ραντάρ είναι σχεδόν άχρηστα.
Αναφορές
[1] Max Planck, The theory of heat radiation, P. Blakiston’s Son & Co, Philadelphia, 1914.
[2] Electronic Warfare and Radar Systems – Engineering Handbook, NAWCWD TP 8347 4th Ed., Naval Air Warfare Center Weapons Division, Point Mugu, California, 2013.
[3] G.-K. Gaitanakis, K. C. Zikidis and G. P. Kladis, Multi-sensor Data Fusion for 3D Target Tracking: A Synergy of Radar and IRST (InfraRed Search & Track), presented at the Int’l Scientific Conference «eRA-12», Piraeus University of Applied Sciences (PUAS), Attica, Greece, 24-25 October 2017.
[4] Peter E. Davies, US Marine Corps F-4 Phantom II Units of the Vietnam War, Osprey Publishing, Oxford, UK, 2012.
[5] Bill Sweetman, Gripen Sensors Claim Counter-Stealth Performance, Aviation Week & Space Technology, Mar 17, 2014. http://aviationweek.com/awin/gripen-sensors-claim-counter-stealth-performance
[6] Philip Hill and Carl Peterson, Mechanics and Thermodynamics of Propulsion (2nd Edition), Pearson, 1991.
[7] Thomas W. Wild and Michael J Kroes, Aircraft Powerplants, 8th Edition, McGraw-Hill Education, 2013.
[8] A. Rao and S.P. Mahulikar, Aircraft Powerplant and Plume Infrared Signature Modelling and Analysis, 43rd AIAA Aerospace Sciences Meeting and Exhibit, 10 – 13 January 2005, Reno, Nevada, USA.
[9] Björn Hässler, Atmospheric Transmission Models for Infrared Wavelengths, Master thesis, Linkoping University, (1998).
[10] Stephen B. Campana, ed., Passive Electro-Optical Systems, The Infrared and Electro-Optical Systems Handbook – Volume 5, Infrared Information Analysis Center, Michigan, and SPIE Optical Engineering Press, 1993.
[11] Ian Moir and Allan Seabridge, Military Avionics Systems, Wiley press, 2006.
[12] Leonardo Airborne and Space Systems, SkyWard IRST Technical Characteristics. http://www.leonardocompany.com/en/-/skyward-1
[13] USAF Scientific Advisory Board, New world vistas: Air and space power for the 21st century : munitions volume, University of Michigan Library, 1996.
[14] D. Knežević, A. Redjimi, K. Mišković, D. Vasiljević, Z. Nikolić and J. Babić, Minimum resolvable temperature difference model, simulation, measurement and analysis, Optical and Quantum Electronics, 48(332), (2016).
[15] Hanping Wu and Xinjian Yi, Operating Distance Equation and Its Equivalent Test for Infrared Search System with Full Orientation, International Journal of Infrared and Millimeter Waves, 24(12), (2003), 2059–2068.
[16] Luigi Enrico Guzzetti, Livio Busnelli, EF2000 PIRATE Test flights campaign, Proc. of SPIE 7109, (2008).
[17] Paul R . Norton, Handbook of Optics, Third Edition, II(15), (2009).
[18] P. V. Coates, The Fusion of an IR Search and Track With Existing Sensors To Provide a Tracking System for Low Observability Targets, AGARD, AG-337, (1996), 32 – 47.
[19] B. Sozzi, E. Fossati, G. Barani, N. Santini, A. Ondini, G. Colombi and C. Quaranta, Simulator of IRST system with ATR embedded functions, Proc. SPIE 7660, Infrared Technology and Applications XXXVI, 766003, (2010).
[20] Ingmar A. Andersson, Leif Haglund, SAAB IRST: the system and flight trials, SPIE 4820, Infrared Technology and Applications XXVIII, (2003).
[21] P. Touzopoulos, D. Boviatsis and K.C. Zikidis, 3D Modelling of Potential Targets for the purpose of Radar Cross Section (RCS) Prediction, Proceedings of the 6th International Conference on Military Technologies (ICMT2017), Brno, Czech Republic, (2017), 636 – 642. https://ieeexplore.ieee.org/document/7988835